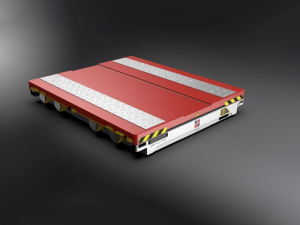
4D shuttle sustavi standardnog tipa
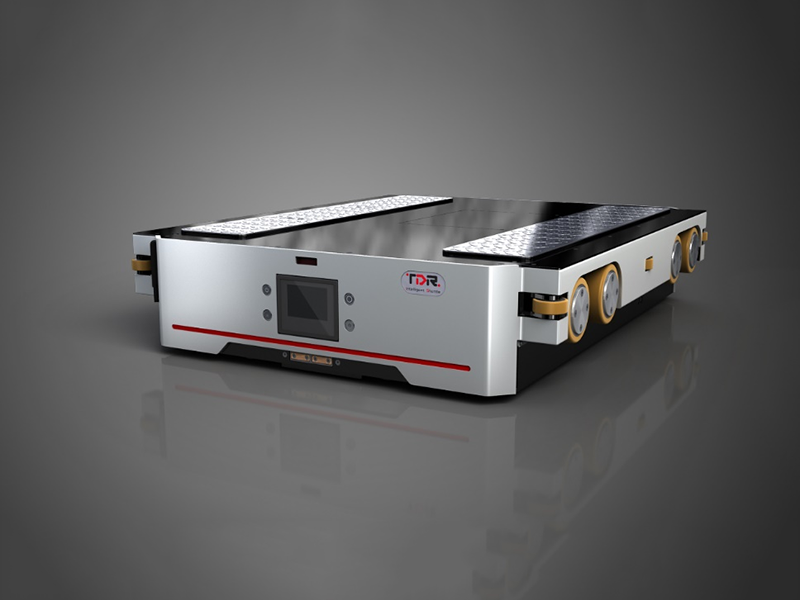
Vertikalna i horizontalna kabina sastoje se od dva seta pogonskih sustava i dva seta sustava za dizanje. Dva seta pogonskih sustava odgovorna su za kretanje primarnog i sekundarnog prolaza; jedan od dva seta sustava za dizanje odgovoran je za podizanje tereta, a drugi je odgovoran za pokretanje primarnog i sekundarnog prolaza. Prebacivanje; i glavni kanal i sekundarni kanal koriste regulaciju brzine rada bez četkica istosmjernim servo motorom, krivulja regulacije brzine je glatka, a stabilnost rada dobra. I glavni i sekundarni uređaji za dizanje koriste bezčetkične istosmjerne motore, koji se oslanjaju na mehanizme zupčanika i letve za podizanje i spuštanje.
Vertikalni i horizontalni automobil ima pet načina rada: daljinsko upravljanje, ručni, poluautomatski, lokalno automatski i online automatski.
Dolazi s više sigurnosnih zaštita i sigurnosnih upozorenja, regionalnim sigurnosnim alarmima, operativnim sigurnosnim alarmima i interaktivnim sigurnosnim alarmima.
standardno poslovanje
Sastavljanje prijemnica i skladištenje izvan skladišta
Sloj promjene premještanja i naplate zaliha
Tehnički parametri
| projekt | Osnovni podaci | Napomena | |
| model | SX-ZHC-B-1210-2T | ||
| Primjenjiva ladica | Širina: 1200 mm Dubina: 1000 mm | ||
| Maksimalno opterećenje | Maks. 1500 kg | ||
| visina/težina | Visina tijela: 150 mm, težina shuttlea: 350 kg | ||
| hodati glavni smjer X | ubrzati | Maksimalna brzina bez opterećenja: 2,0 m/s, najveća brzina pri punom opterećenju: 1,0 m/s | |
| ubrzanje hodanja | ≤1,0 m/S2 | ||
| motor | Servo motor bez četkica 48VDC 1000W | Servo bez četkica | |
| upravljački program poslužitelja | Servo pogon bez četkica | Domaći servo | |
| Hodajte u smjeru Y | ubrzati | Maksimalna brzina bez opterećenja: 1,0 m/s, maksimalna brzina pri punom opterećenju: 0,8 m/s | |
| ubrzanje hodanja | ≤0,6 m/S2 | ||
| motor | Servo motor bez četkica 48VDC 1000W | Servo bez četkica | |
| upravljački program poslužitelja | Servo pogon bez četkica | Domaći servo | |
| dizanje tereta | Visina dizalice | 30 mm | |
| motor | Bezčetkični motor 48VDC 750W | Domaći servo | |
| glavno dizanje | Visina dizalice | 35 mm | |
| motor | Bezčetkični motor 48VDC 750W | Domaći servo | |
| Glavni kanal/metoda pozicioniranja | Pozicioniranje pri hodanju: pozicioniranje barkoda/pozicioniranje laserom | Njemačka P+F/SICK | |
| Sekundarni kanal/metoda pozicioniranja | Pozicioniranje hoda: fotoelektrično + enkoder | Njemačka P+F/SICK | |
| Pozicioniranje ladice: lasersko + fotoelektrično | Njemačka P+F/SICK | ||
| Upravljački sustav | S7-1200 PLC programabilni kontroler | Njemačka SIEMENS | |
| daljinski upravljač | Radna frekvencija 433 MHz, komunikacijska udaljenost najmanje 100 metara | Uvoz prilagođenih | |
| Napajanje | litijeva baterija | Domaća visoka kvaliteta | |
| Parametri baterije | 48V, 30AH, vrijeme korištenja ≥ 6h, vrijeme punjenja 3h, vrijeme punjenja: 1000 puta | bez održavanja | |
| metoda kontrole brzine | Servo upravljanje, konstantni moment pri maloj brzini | ||
| Metoda upravljanja prečkom | WCS raspoređivanje, upravljanje računalom dodirom, upravljanje daljinskim upravljačem | ||
| razina buke pri radu | ≤60 dB | ||
| Zahtjevi za bojanje | Kombinacija nosača (crna), gornji poklopac crveni, prednji i stražnji aluminij bijeli | ||
| temperatura okoline | Temperatura: 0℃~50℃ Vlažnost: 5% ~ 95% (bez kondenzacije) | ||